sandbox
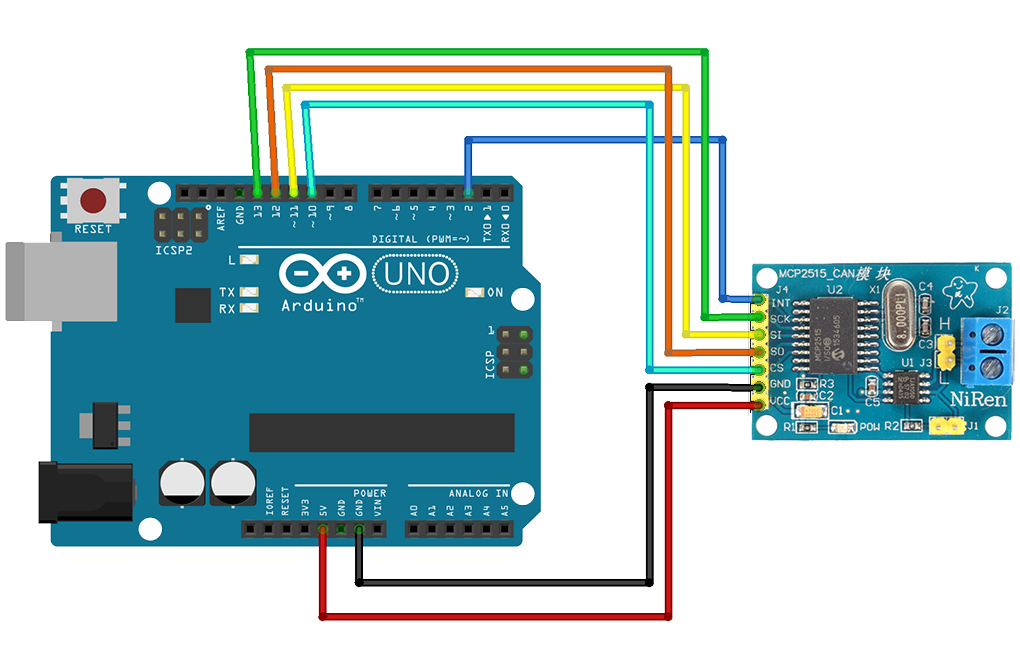
CAN-bus sniffing
CANcool
'Berechnungs-Term'
<< Bits shift left
>> Bits shift right
& AND
| OR
~ XOR
d0 1st byte (decimal)
d1 2nd byte (decimal)
d3 3rd byte (decimal)
d4 ...
d5 ...
d6 ...
d7 ...
((d0 << 8) + d1) ^= MSB * 256 + LSB //unsigned short (16-bit)
(((d0 << 8) + d1) - ((d0 >> 7)*65536)) //Signed short (16-bit) Two's complement
DC charging
CCS
- prerequisites
- explore V2G protocol
- discover BMS <> Charger CANbus conversation
- develop BMS <> PCL communication
- parts
- CCS-socket e.g. Phoenix Contact ~EUR 800,-
- input voltage monitor
- power contactor (+125A disconnecting device) Tyco ~EUR 150,-
- current monitor
- V2G in-vehicle-charge-controller e.g. EVAcharge SE ~EUR 750,-
- ARM microcontroller
- Linux OS
- fully programmable
- PWM duty cycle detection (CP low level communication)
- switchable resistors (CP low level communication)
- HomePlug Green PHY integration (PLC high level communication)
- Proximity pilot signal input (PP)
- lock-motor output
- lock-motor end switch input
- lock-motor fault pin
- CAN transceiver (BMS communication)
- 6 GPIOs (current-monitoring?, voltage-monitoring?, temprature-monitoring?, power contactor-driver?, (contactor-monitoring?))
 (8MHz EUR 4,79)
(8MHz EUR 4,79)