Difference between revisions of "TrueWind"
(→calculate True Wind from Apparent Wind) |
(→simplified, assuming H=COG) |
||
| Line 34: | Line 34: | ||
** <b>TWS</b> True Wind Speed (relative to ground) <b>environment.wind.speedOverGround</b> | ** <b>TWS</b> True Wind Speed (relative to ground) <b>environment.wind.speedOverGround</b> | ||
** <code>SQRT (POWER(AWy,2) POWER(-SOG + AWx,2))</code> | ** <code>SQRT (POWER(AWy,2) POWER(-SOG + AWx,2))</code> | ||
| + | http://1.bp.blogspot.com/-MeBJW4WFKu8/UXWPPPk0w_I/AAAAAAAABTM/iuky5duX4kk/s1600/True+True+Wind2.jpg | ||
== see also == | == see also == | ||
Revision as of 09:42, 30 October 2018
Contents
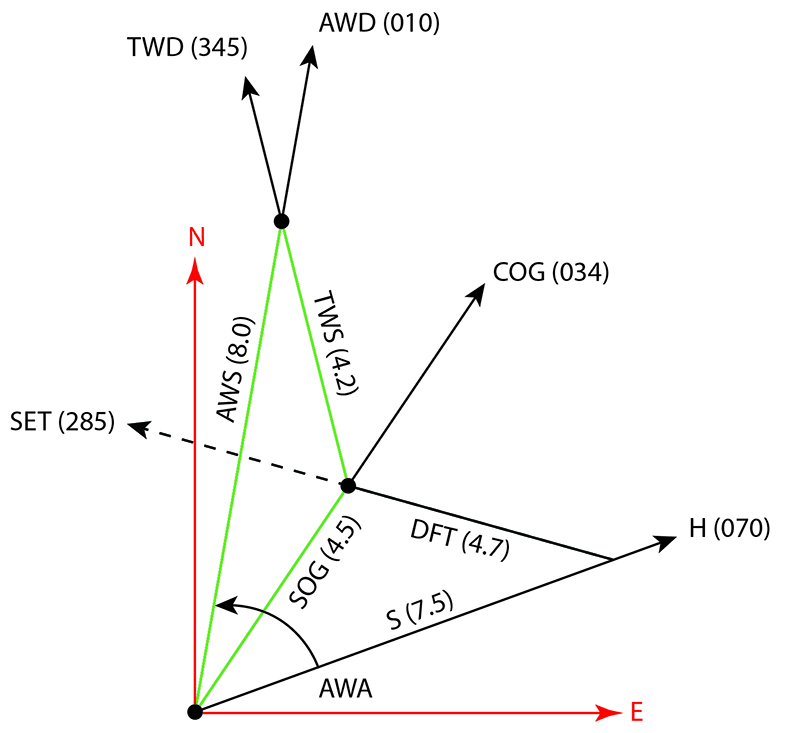
calculate True Wind from Apparent Wind
- AWA Apparent Wind Angle (relative to H) environment.wind.angleApparent
- H Heading (relative to true north) navigation.headingTrue
- AWD Apparent Wind Direction (relative to true north) environment.wind.directionTrue
AWD = MOD(H+AWA;360)
- AWS Apparent Wind Speed environment.wind.speedApparent
- COG Course Over Ground navigation.courseOverGroundTrue
- SOG Speed Over Ground navigation.speedOverGround
- TWS True Wind Speed (relative to ground) environment.wind.speedOverGround
TWx = SOG * Sin (COG) - AWS * Sin (AWD)TWy = SOG * Cos (COG) - AWS * Cos (AWD)TWS= SQRT (TWx*TWx + TWy*TWy)- TWD True Wind Direction (relative to true north) ???
TWD = ATAN ( TWx / TWy )
- STW Speed Trough Water navigation.speedThroughWater
- DFT Current Drift (speed relative to ground) environment.current.drift
DFTx = SOG * Sin (COG) - STW * Sin (H)DFTy = SOG * Cos (COG) - STW * Cos (H)DFT= SQRT (DFTx*DFTx + DFTy*DFTy)- SET Current Set (direction relative to true north) environment.current.setTrue
SET = ATAN ( DFTx / DFTy )
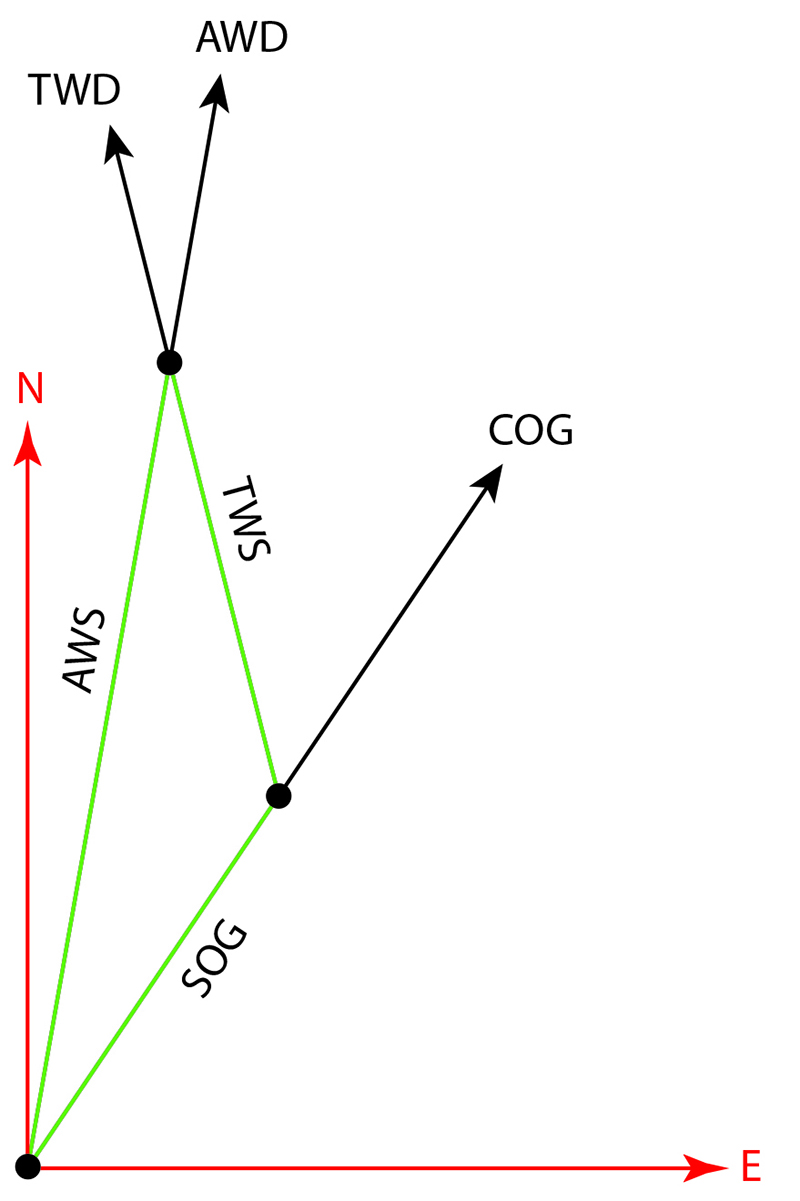
simplified, assuming H=COG
- COG Course Over Ground navigation.courseOverGroundTrue
- SOG Speed Over Ground navigation.speedOverGround
- AWA Apparent Wind Angle (relative to H) environment.wind.angleApparent
- AWS Apparent Wind Speed environment.wind.speedApparent
AWx = AWS * Cos (AWA)AWy = AWS * Sin (AWA)- TWA True Wind Angle (relative to H) environment.wind.angleTrueGround
ATAN2(AWy, -SOG + AWx)- TWS True Wind Speed (relative to ground) environment.wind.speedOverGround
SQRT (POWER(AWy,2) POWER(-SOG + AWx,2))
see also
- http://davidburchnavigation.blogspot.com/2013/04/true-true-wind-from-apparent-wind.html
- https://coaps.fsu.edu/woce/truewind/paper/index.html
Sensors
Heading
- see also http://www.navlab.net/Publications/The_Seven_Ways_to_Find_Heading.pdf
- magnetic compass
- H true = H magnetic + Magnetic declination
- Fluxgate compass
- H true = H magnetic + Magnetic declination
- Gyrocompass
- H true
- moving baseline Real-time kinematic (GPS)
- H true
SOG and COG
- GPS receiver
STW
AWS and AWA
- wind-vane (AWA)
- anemometer
- cup (AWS)
- hand held propeller (AWS)
- ultrasonic (AWS and AWA)