Difference between revisions of "MIA electric"
(→'Berechnungs-Term') |
(→'Berechnungs-Term') |
||
| Line 14: | Line 14: | ||
==== 'Berechnungs-Term' ==== | ==== 'Berechnungs-Term' ==== | ||
* operators: | * operators: | ||
| + | + // addition | ||
| + | - // subtraction | ||
| + | * // multiplication | ||
| + | / // division | ||
<< // Bit shift left | << // Bit shift left | ||
>> // Bit shift right | >> // Bit shift right | ||
Revision as of 17:12, 14 December 2017
Contents
sandbox
CAN-bus sniffing
- parts
- Arduino UNO R3 (or CH340 clone EUR 6,49)
- MCP2515 / TJA1050 shield
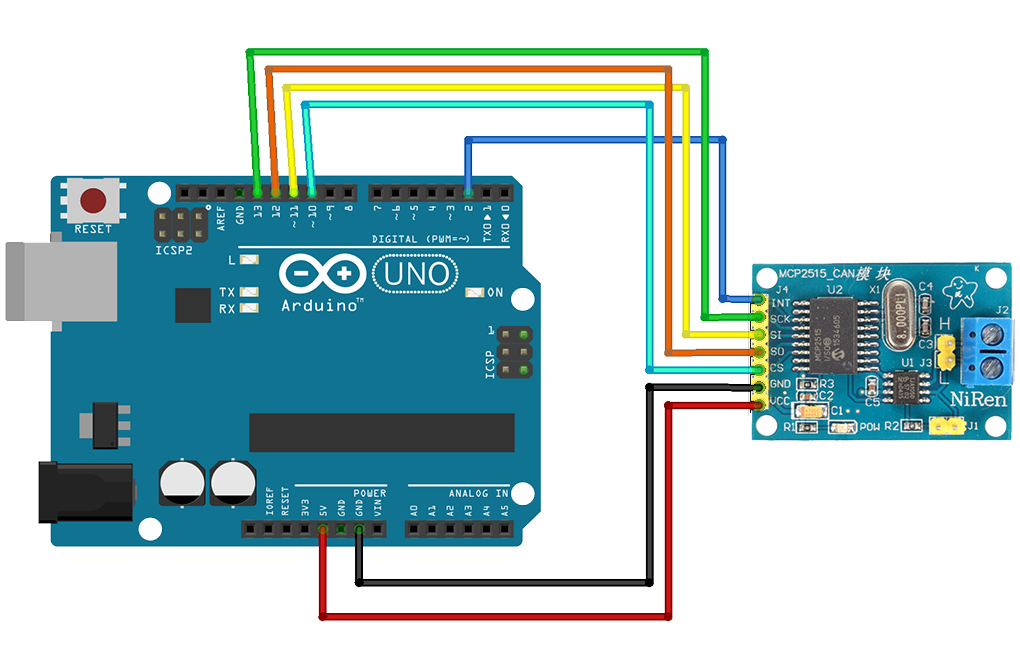 (8MHz EUR 4,79)
(8MHz EUR 4,79) - https://github.com/latonita/arduino-canbus-monitor (MCP_8MHz, CAN_500KBPS)
- OBD-II connector: Pin-6=CAN-high / Pin-14=CAN-low
- CANcool https://github.com/MHS-Elektronik/CANcool
CANcool
'Berechnungs-Term'
- operators:
+ // addition - // subtraction * // multiplication / // division << // Bit shift left >> // Bit shift right & // AND | // OR ~ // XOR
- variables:
d0 1st byte (decimal) d1 2nd byte (decimal) d3 3rd byte (decimal) d4 ... d5 ... d6 ... d7 ...
- samples:
d0 // unsigned char (8-bit) (d0 - ((d0 >> 7)*256)) // signed char (8-bit) Two's complement ((d0 << 8) + d1) ^= MSB * 256 + LSB // unsigned short (16-bit) (((d0 << 8) + d1) - ((d0 >> 7)*65536)) // signed short (16-bit) Two's complement ((d0 << 24) + (d1 << 16) + (d2 << 8) + d3) // unsigned integer (32-bit) ((d0 << 24) + (d1 << 16) + (d2 << 8) + d3)-((d0 >> 7)*4294967296)) // signed integer (32-bit) Two's complement 256 = (1 << 8) 65536 = (1 << 16) 16777216 = (1 << 24) 4294967296 = (1 << 32)
DC charging
CCS
- prerequisites
- explore V2G protocol
- discover BMS <> Charger CANbus conversation
- BMS/Battery e4v.eu
- onboard charger ies-synergy.com
- develop BMS <> PCL communication
- parts
- CCS-socket e.g. Phoenix Contact ~EUR 800,-
- input voltage monitor
- power contactor (+125A disconnecting device) Tyco ~EUR 150,-
- current monitor
- V2G in-vehicle-charge-controller e.g. EVAcharge SE ~EUR 750,-
- ARM microcontroller
- Linux OS
- fully programmable
- PWM duty cycle detection (CP low level communication)
- switchable resistors (CP low level communication)
- HomePlug Green PHY integration (PLC high level communication)
- Proximity pilot signal input (PP)
- lock-motor output
- lock-motor end switch input
- lock-motor fault pin
- CAN transceiver (BMS communication)
- 6 GPIOs (current-monitoring?, voltage-monitoring?, temprature-monitoring?, power contactor-driver?, (contactor-monitoring?))